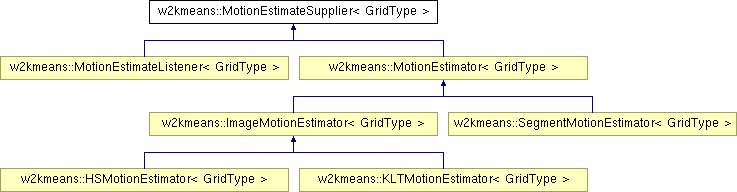
Inheritance diagram for w2kmeans::MotionEstimateSupplier< GridType >:
Public Member Functions | |
| void | addMotionEstimateHandler (code::SmartPtr< MotionEstimateHandler< GridType > > a) |
| Add an estimate handler. | |
| MotionEstimateSupplier () | |
| virtual | ~MotionEstimateSupplier () |
| bool | isProcessing () const |
| returns true while processing the input, and false if waiting for new inputs. | |
| virtual bool | shouldProcessInputAt (const code::Time &newTime) const |
| are we ready to process the next input? In general, we are always ready, since we have no idea how often the motion estimates are going to arrive . | |
Protected Member Functions | |
| void | notifyMotionEstimate (const GridType &motionEast, const GridType &motionSouth, const GridType &growthRate, size_t scale, bool complete) |
| subclass implementors should call this method when they have this information. | |
| void | notifyIntermediateProduct (const code::DataType &grid) |
| this method may be called for handlers who write out intermediate products. | |
| void | setProcessingFlag (bool input) |
| w2kmeans::MotionEstimateSupplier< GridType >::MotionEstimateSupplier | ( | ) | [inline] |
| virtual w2kmeans::MotionEstimateSupplier< GridType >::~MotionEstimateSupplier | ( | ) | [inline, virtual] |
| void w2kmeans::MotionEstimateSupplier< GridType >::addMotionEstimateHandler | ( | code::SmartPtr< MotionEstimateHandler< GridType > > | a | ) | [inline] |
Add an estimate handler.
we will call handleMotionEstimate on this object whenever we generate a new motion estimate.
| bool w2kmeans::MotionEstimateSupplier< GridType >::isProcessing | ( | ) | const [inline] |
returns true while processing the input, and false if waiting for new inputs.
| void w2kmeans::MotionEstimateSupplier< GridType >::notifyIntermediateProduct | ( | const code::DataType & | grid | ) | [protected] |
this method may be called for handlers who write out intermediate products.
| void w2kmeans::MotionEstimateSupplier< GridType >::notifyMotionEstimate | ( | const GridType & | motionEast, | |
| const GridType & | motionSouth, | |||
| const GridType & | growthRate, | |||
| size_t | scale, | |||
| bool | complete | |||
| ) | [protected] |
subclass implementors should call this method when they have this information.
| void w2kmeans::MotionEstimateSupplier< GridType >::setProcessingFlag | ( | bool | input | ) | [inline, protected] |
| virtual bool w2kmeans::MotionEstimateSupplier< GridType >::shouldProcessInputAt | ( | const code::Time & | newTime | ) | const [inline, virtual] |
are we ready to process the next input? In general, we are always ready, since we have no idea how often the motion estimates are going to arrive .
.. Subclasses can over-ride this, to allow data providers to decide whether or not the input data is required at this time.
Reimplemented in w2kmeans::MotionEstimator< GridType >.
 1.4.7
1.4.7